Here is a list of frequently asked questions concerning VIZARIO.Cam.
Q: How do I actually use VizarCam?
The principle way to use it is to print a checker board or circles board, to configure the app and to capture a plausible number of images automatically by simply tilting and turning your device – the results will show up automatically. The XML and image data can be shared through email or iTunes to further use the data.
Q: Where do I find targets?
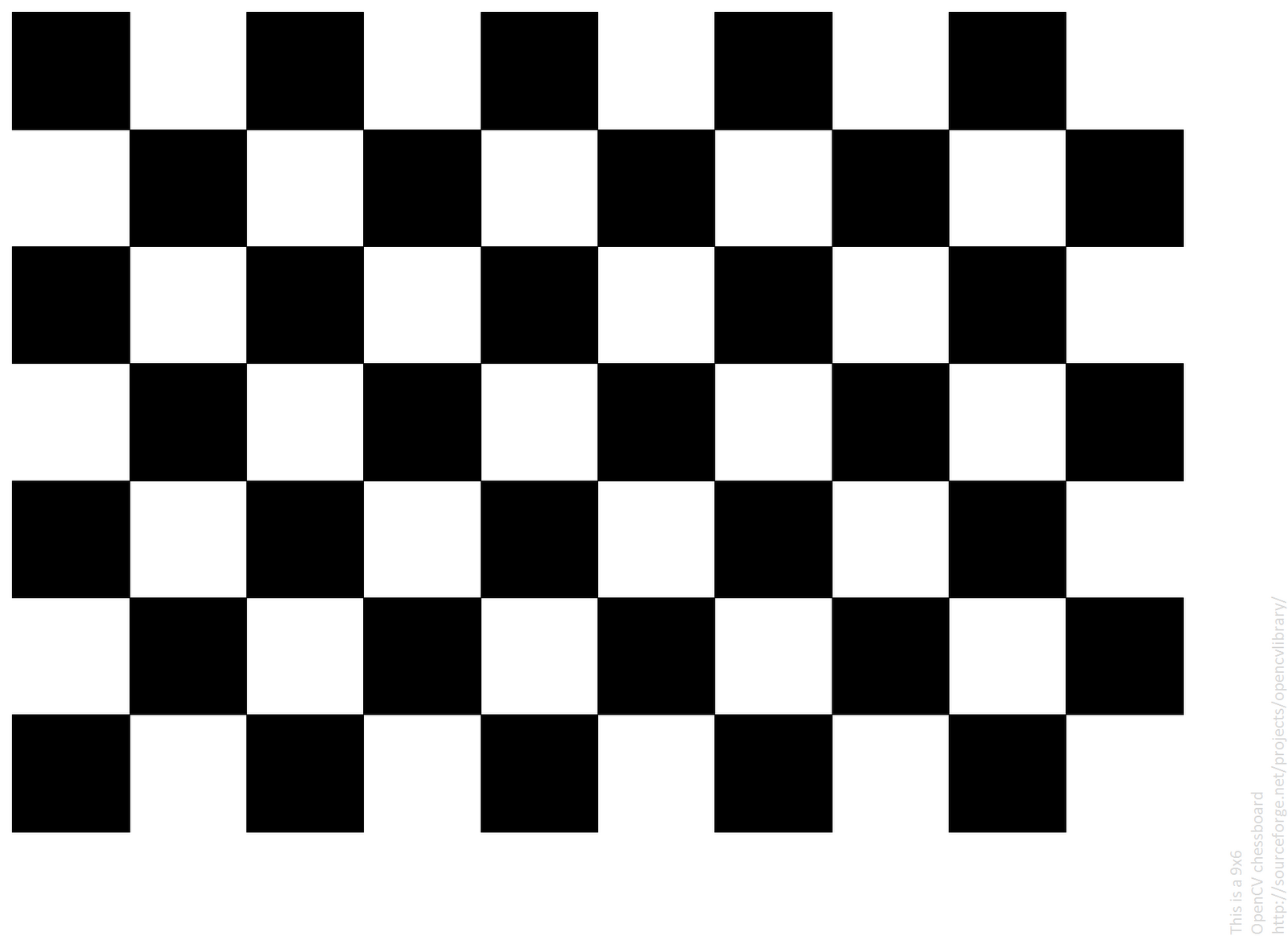
Here are two example targets you can use.
OpenCV 9×6 Checkerboard Target
{kind=link}
OpenCV 9×6 Symmetric Circles Target
11×4 Asymmetric Circles Target
Q: Is there anything I have to consider?
Always place the targets on a flat surface. Don”t use targets which are not flat or are worn out, folded or kinked, or somehow not flat any more if placed on a flat surface like the floor or the desk.
Q: Why is the asymmetric circles pattern not available?
Because there is a bug in the current code we have to fix first. It will be available with the next release in March 2016.
Q: How many images should I use?
You should use as many as possible, but everything will become slower of course. With more images however, you can get more accurate and stable results.
Q: Why is it slow on large resolutions?
It is currently slow because the detection routine runs on the full image resolution. With the release in March 2016, this problem will be gone and it will be fast on all available resolutions.
Q: Can you provide a sample application how to further use the data generated by VizarCam?
Yes. With the March 2016 version, we will also provide a Unity example how to use it.
Q: It does not do anything! What shall I do?
Check the settings for the horizontal and vertical corners. Usually the detection does not work because the settings don”t match the board specifications.
Q: How do the horizontal and vertical corner settings work?
The horizontal and vertical corners refer to the inner number of corners on your checker board. If you encounter any problems with the detection, make sure these numbers are correct. Note that having an odd number of corners improves performance because there is an internal mathematical ambiguity, which cannot be fully resolved if you choose even numbers for both horizontal and vertical.
For circles boards, the number refers to the number of circles in the horizontal and vertical direction. For asymmetric circle boards (coming March 2016), the number refers to the horizontal and vertical number of rows on the board, i.e. counting the circles in horizontal direction in the first row including those in the asymmetric row, but for the vertical number not counting the asymmetric rows).
Sounds complicated. If you are not sure about the settings, just use one of the targets provided above and you”ll be safe.
Q: Why is it slow if I choose more than 50 images?
Depending on your device, the mathematical calculations become quite challenging if you have many corners/circles and a large number of images at the same time. However, with newer generation phones, you can easily process more than 50 images, and even with 50 images, the results are quite ok for your application.
Q: What if the error on the results pages is larger than 1-2 pixels?
Depending on the image resolution you used, this might be a bigger or smaller issue. For large scale images (multi-megapixel), it”s natural to have errors in the range of a few pixels. For small resolutions (1080p or below) you should get errors below 1.0 pixel. In any other case, you should rerun the calibration procedure.
Q: Why does it not add any more images if I hold my device still?
Because we have added functionality to check if new images are taken from different viewing angles, to make sure the variety of images is plausible for getting a good calibration result.
Q: It seems that I got a correct result. What shall I do now?
Now it”s your turn. Use the data in your application and check out the difference.
Q: I”m not fully convinced that I really need this. Why should I?
Whether or not you believe it, mathematically you have no choice than using correct calibration data if you want to get your Computer Vision or Augmented Reality application work. It”s more a question of “quick and dirty”, or “quick and sophisticated” – VizarCam is the latter.
Q: How actively is VizarCam maintained?
We are working hard to bring out the next release beginning of March 2016. It will contain major updates to speed up detection and to include more infos to make the overall workflow even more intuitive.
Q: Does it send any of my private data to us?
Of course not. The free version is only sending the calibration info for us to do statistical analysis on a larger number of calibrations from mobile devices in general.
Q: Why is it free?
Because we believe that everybody should be enabled to work with correct calibration data, and we want to emphasize the importance of correct calibration data for all tasks that involve Computer Vision and calculations beyond the image plane.
Q: Can I turn off the sending of data to us?
Yes, with the release in March 2016, you can disable sending the data through In-App purchase.
Q: Can I get hold of the data we collect?
Yes, you can. Drop us a line through the support contact.
Q: I did not find an answer to my question in the FAQ. What shall I do?
Drop me a line: support [at] arth.co.at